PID Control System and AI Adaptation
公告日期
2023-09-25
公告團隊
科技專案創客群
開始時間
2023-08-27 21:40
結束時間
2023-08-27 21:40
活動類別
工作坊
活動地點
遠距
參加人數
社群成員 2人
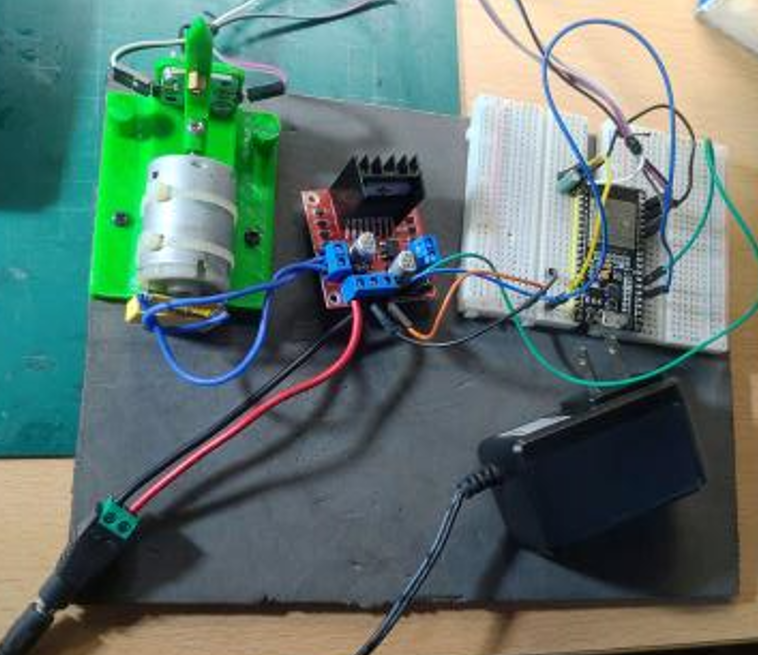
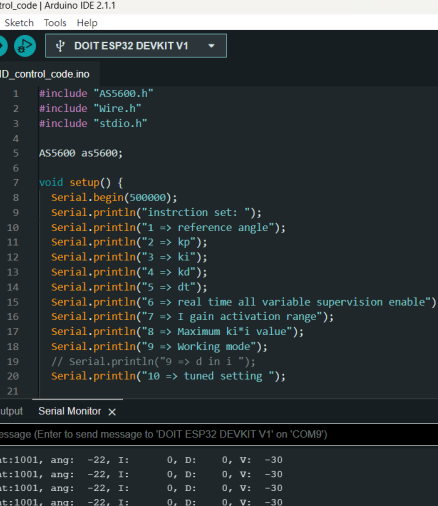
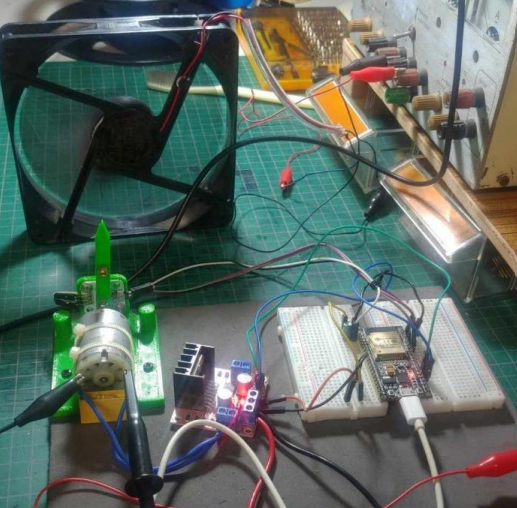
Abstract — In this project, a feedback system is composed of a motor, AS5600 decoder, ESP32 microcontroller, and L298N H-bridge motor driver. This integrated setup is utilized for angle control of the motor using a PID algorithm. Besides rotating the motor shaft to a specific angle, by adjusting the PID parameters and algorithm, it becomes possible to simulate different rotational sensations, such as those resembling gears or damping effects.
In addition to optimizing through manual PID parameter adjustments, the Proximal Policy Optimization (PPO) technique from the field of Reinforcement Learning is also employed to tune the PID parameters.
Conclusion—Based on the structure of a brushed DC motor, instability in control occurs within the intervals of commutator switching. To address this, a subsequent improvement involves transitioning to the use of a brushless motor.
During the implementation process, it was observed that the ESP32's response speed was approximately 1ms, which appears to be lower in comparison to other motor control systems.
Whether this issue stems from hardware or software requires further discussion and subsequent investigation. Manual parameter adjustment is viable but time-consuming and labor-intensive, demanding a high level of skill from operators. As for the AI aspect, its viability remains pending the outcome of future experiments.
活動照片
活動影片
PID control